您现在的位置是:首页 > PLC技术 > PLC技术
PID控制器在连续控制系统中的表达式
![]() 来源:艾特贸易2017-12-20
来源:艾特贸易2017-12-20
简介PID 控制器的传递函数为 模拟量 PID 控制器的输出表达式为 (10-1) 式中,控制器的输入量(误差信号)为 ev(t)=sp(t)-pv(t) sp(t) 为设定值, pv(t) 为过程变量(反馈值); mv(t) 是控制器的输出
PID控制器的传递函数为
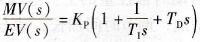
模拟量PID控制器的输出表达式为
 (10-1)
(10-1)
式中,控制器的输入量(误差信号)为
ev(t)=sp(t)-pv(t)
sp(t)为设定值,pv(t)为过程变量(反馈值);mv(t)是控制器的输出信号,Kp为比例系数,TI和TD分别是积分时间和微分时间,M是积分部分的初始值。
式(10-1)中等号右边的前3项分别是比例、积分、微分部分,它们分别与输入量误差ev(t)、误差的积分和误差的微分成正比。如果取其中的一项或两项,可以组成P、PI或PD调节器。一般可以采用PI控制方式,控制对象的惯性滞后较大时,应采用PID控制方式。
积分和微分属于高等数学中的概念,但是并不难理解,它们都有明确的几何意义。控制器输出量中的比例、积分、微分部分都有明确的物理意义。
(部分原创文章应编辑稿费需求,每篇需要收取2元的稿费,如需查看全文请联系客服索取,谢谢理解!在线客服: )
)
点击排行
 PLC编程的基本规则
PLC编程的基本规则