您现在的位置是:首页 > PLC技术 > PLC技术
台达DVP-PLC与ASD-A伺服驱动器通信位置控制程序设计范例
![]() 来源:艾特贸易2018-01-23
来源:艾特贸易2018-01-23
简介PLC 与 ASD-A 伺服驱动器通信(位置控制, MODRD/MODRW ) 伺服控制指示面板如图 12-6 所示。 图 12-6 伺服控制指示面板 台达 ASD-A 伺服硬件接线如图 12-7 所示。 图 12-7 台达 ASD-A 伺服硬件接线
PLC与ASD-A伺服驱动器通信(位置控制,MODRD/MODRW)
伺服控制指示面板如图12-6所示。

图12-6 伺服控制指示面板
台达ASD-A伺服硬件接线如图12-7所示。

图12-7 台达ASD-A伺服硬件接线
【控制要求】
(1)读取伺服驱动器的目标位置(增量型位置)(MODRD指令实现)。
(2)设置伺服驱动器的目标位置(增量型位置)(MODRW指令实现)。
(3)按下对应开关和按钮,伺服启动和定位动作被触发(利用伺服DI1~DI2输入点)。
(4)将伺服的状态通过面板上指示灯显示出来(利用伺服DO1~DO3输出点)。
【ASD-A伺服驱动器参数必要设置】
ASD-A伺服驱动器参数必要设置见表12-7。
表12-7 ASD-A伺服驱动器参数必要设置

当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照表12-7进行参数设置。
操作步骤如图12-8所示。
(1)将伺服电动机的参数设置完后,重新上电,若无异常现象,“电源正常”指示灯(DO1)会On。
(2)等待“电源正常”指示灯On之后,拨动“伺服启动”开关到On位置,使DI1=On,伺服电动机启动,如无异常现象发生,“启动正常”指示灯(DO2)会On。
(3)等待“启动正常”指示灯On之后,按下“定位触发”按钮,DI2被触发一次,伺服电动机转动10.5圈,完成后“位置到达”指示灯(对应DO3)会On。

图12-8 操作步骤
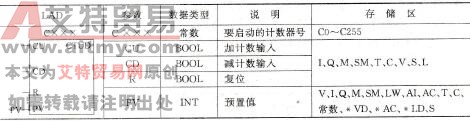
【元件说明】
元件说明见表12-8。
表12-8 元件说明

【控制程序】
控制程序如图12-9所示。


图12-9 控制程序
【程序说明】
(1)对PLC RS-485通信口进行初始化,使其通信格式为MODBUS ASCII,9600,7,E,1。ASD-A系列伺服驱动器的通信格式与PLC通信口保持一致。
(2)当M0=On时,[MODRD K1 H10F K2]被执行,将第一段内部位置的转数和脉冲数读出并自动存放到D1050、D1051中。
(3)当M1=On时,[MODWR K1 K16 H10F D10 K2]被执行,将D10、D11的内容分别写入H10F、H110内。
(4)伺服电动机的启动信号和触发信号均由伺候自身外部接线开关控制,接线方式参考图12-7。
(5) MODBUS通信只会出现4种情况,正常通信完成对应通信标志M1127,通信错误对应通信标志M1129、M1140、M1141,所以,在程序中通过对这4个通信标志信号的On/Off状态进行计数,再利用C0的数值来控制3个MODBUS指令的依次执行,保证通信的可靠性。
(6) PLC一开始RUN,比较C0=0,就一直反复地对伺服驱动器进行通信的读写。
(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)
点击排行
 PLC编程的基本规则
PLC编程的基本规则