您现在的位置是:首页 > 变频技术 > 变频技术
PWM逆变器输出电压的矢量表示
![]() 来源:艾特贸易2019-02-27
来源:艾特贸易2019-02-27
简介如果三相交流电压是正弦波,相电压为: 可以看出,对于三相正弦交流电压,它的瞬时空间电压矢量为以ω角速度旋转的矢量,对应不同时刻,就处在不同的位置。 众所周知,电压的时
如果三相交流电压是正弦波,相电压为:
可以看出,对于三相正弦交流电压,它的瞬时空间电压矢量为以ω角速度旋转的矢量,对应不同时刻,就处在不同的位置。
众所周知,电压的时间积分是磁通。对瞬时空间电压矢量进行积分得磁通矢量

可见磁通矢量比电压矢量落后2/π的旋转矢量,磁通矢量的轨迹为圆,圆周的半径为

可以看出,异步电动机使用正弦电压供电时,气隙磁场是圆形旋转磁场,磁通矢量轨迹处在以一定速度均匀旋转的圆上,电动机的转矩没有脉动。按此思路,如果变频器在进行PWM控制时让变频器所产生的电动机磁通轨迹在近似为圆周上均匀移动,应该可以减小转矩的脉动、并可控制电动机的转矩。
现研究变频器的输出电压的瞬时空间电压矢量。图7-17为3相电压型逆变器的主电路,为了研究方便,假定直流侧带有中性点,且与电动机的中性点相接。

图7 -17 3相电压型逆变器的主电路
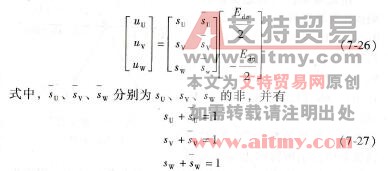
定义三相桥臂的上侧开关导通状态记作“si =1”,下侧开关导通状态记作“Si =0”。当Si=1时,电动机的相电压等于- Edc/2;当Si=0时,电动机的相电压等于-Edc/2。用U(Su、Sv、 Sw)表示三相逆变器的电压矢量,Su、Sv、Sw分别为U、V、W相桥臂的开关状态。
于是三相逆变器的输入和输出的关系,可以用开关函数来描述。三相输出电压为
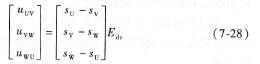
三相输出线电压为
直流输入电流为idc
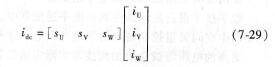
由此可以看出,当Su=Sv=Sw时,逆变器的直流输入电流idc=0;否则,直流输入电流为某一相线电流值。
将式(7-26)的三相逆变器的输出电压代入空间电压矢量的式(7-22),则逆变器的电压矢量如图7-18所示。
以Us(1,0,1)为例,由式( 7-26)有
代入式(7-22),得

可得图7 -18中的电压矢量U5(1,0, 1)。

图7 -18逆变器
的电压矢量
由此可见,三相逆变器的空间电压矢量只有8种,即Uo (0,0,0),U1(0,0,1),U2 (0,1,0),U3(0,1,1),U4(1,0,0),U5(1,0,1),U6(1,1,0),U7(1,1,1)。其中Uo(0,0,0)和U7(1,1,1)为零矢量,矢量的模为0,它对应逆变器的三个桥臂的上部开关器件(或下部开关器件)同时处于导通(或关断)状态,因而电动机的三相绕组处于短路状态。
利用空间电压矢量的概念可以对PWM波形进行评估,并可利用空间电压矢量控制电动机的气隙磁通并减小异步电动机的转矩脉动。
采用空间矢量控制的三电平逆变器
数字技术很自然地延伸到多电平逆变器中。事实上,多电平逆变器中空间矢量控制技术的原理与两电平逆变器的相同。
更高的电压等级会增加此技术实际应用的复杂性。例如,在Ⅳ:3电平逆变器中,每臂允许有N=3种不同的开关组合,因而,共有N3:27种有效开关组合,产生由图7-19所示N3= 27空间矢量(U1,u2,…,u27)表示的N3= 27个负载线电压。例如,由于线电压的标幺值为Uab=0.5、Ubc=0.5、Uca=- 1.0,则U2=0.5+ j0. 866。尽管原理相同,但空间矢量数字算法必须处理更多状态N3。而且,因为一些空间矢量(图7-19 中的U13U14)产生相同的相电压,算法必须根据另外的准则选择两者之一,并把它作为基本空间矢量。很显然,随着电平数量的增加,算法变得越来越复杂,可是电平数量的增加所带来的优点不很明显。在实际应用中最多采用5电平,这需折中考虑实现的复杂程度和所得波形的优劣。
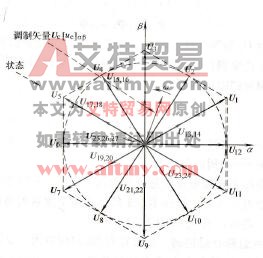
图7 -19 电压源逆变器的空间矢量
(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)