您现在的位置是:首页 > PLC技术 > PLC技术
梯形图顺序控制设计法的步与动作
![]() 来源:艾特贸易2017-10-11
来源:艾特贸易2017-10-11
简介1 .步的基本概念 顺序控制设计法最基本的思想是将系统的一个工作周期划分为若干个顺序相连的阶段,这些阶段称为步 ( Step) ,然后用编程元件(例如存储器位 M )来代表各步。步是
1.步的基本概念
顺序控制设计法最基本的思想是将系统的一个工作周期划分为若干个顺序相连的阶段,这些阶段称为步( Step),然后用编程元件(例如存储器位M)来代表各步。步是根据输出量的ON/OFF状态的变化来划分的,在任何一步之内,各输出量的状态不变,但是相邻两步输出量总的状态是不同的,步的这种划分方法使代表各步的编程元件的状态与各输出量的状态之间有着极为简单的逻辑关系。顺序控制设计法用转换条件控制代表各步的编程元件,让它们的状态按一定的顺序变化,然后用代表各步的编程元件去控制PLC的各输出位。
顺序功能图主要由步、有向连线、转换、转换条件和动作组成。
图5-9是液压动力滑台的进给运动示意图和输入/输出信号的时序图,为了节省篇幅,将分时出现的几个脉冲输入信号的波形画在一个波形图中。设动力滑台在初始位置时停在左边,限位开关I0.3为1状态,Q4.0~Q4.2是控制动力滑台运动的3个电磁阀。与图5-7中的系统相同,按下起动按钮后,动力滑台的一个工作周期由快进、工进、暂停和快退组成,返回初始位置后停止运动。根据Q4.0~Q4.2的ON/OFF状态的变化,一个工作周期可以分为快进、工进、暂停和快退这4步,另外还应设置等待起动的初始步,图中分别用M0.0~M0.4来代表这5步。图5-9的右边是描述该系统的顺序功能图,图中用矩形方框表示步,可以用方框中的数字来作各步的编号,也可以用代表各步的存储器位的地址作为步的代号,例如M0.0等,这样在根据顺序功能图设计梯形图时较为方便。

图5-9 液压动力滑台的顺序功能图
2.初始步
初始状态一般是系统等待启动命令的相对静止的状态。系统在开始进行自动控制之前,首先应进入规定的初始状态。与系统的初始状态相对应的步称为初始步,初始步用双线方框来表示,每一个顺序功能图至少应该有一个初始步。
3.活动步
当系统正处于某一步所在的阶段时,该步处于活动状态,称该步为“活动步”。步处于活动状态时,执行相应的非存储型动作;处于不活动状态时,则停止执行非存储型动作。
4.与步对应的动作或命令
可以将一个控制系统划分为被控系统和施控系统,例如在数控车床中,数控装置是施控系统,而车床是被控系统。对于被控系统,在某一步中要完成某些“动作”( action);对于施控系统,在某一步中则要向被控系统发出某些“命令”( command)。为了叙述方便,下面将命令或动作统称为动作,并用矩形框中的文字或符号来表示动作,该矩形框与相应的步的方框用水平短线相连。如果某一步有几个动作,可以用图5-10中的两种画法来表示,但是并不隐含这些动作之间的任何顺序。

图5-10 动作
说明命令的语句应清楚地表明该命令是存储型的还是非存储型的。非存储型动作“打开1号阀”,是指该步为活动步时打开1号阀,为不活动步时关闭1号阀。非存储型动作与它所在的步是“同生共死”的,例如图5-9的M0.4与Q4.2的波形完全相同,它们同时由0状态变为1状态,又同时由1状态变为0状态。
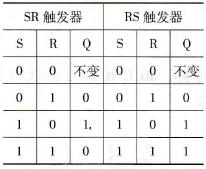
某些动作在连续的若干步都应为1状态(见图5-44中的Q4.0),可以在顺序功能图中,用动作的修饰词“S”将它在应为1状态的第一步置位,用动作的修饰词“R”将它在应为1状态的最后一步的下一步复位为0状态。这种动作是存储型动作,在程序中用置位、复位指令来实现。
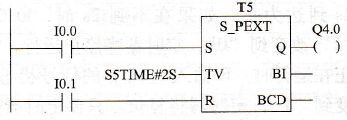
在图5-9的暂停步中,PLC所有的输出量均为0状态。接通延时定时器T0用来给暂停步定时,在暂停步,T0的线圈应一直通电。转换到下一步后,T0的线圈断电。从这个意义上说,T0的线圈相当于暂停步的一个非存储型的动作,因此可以将这种为某一步定时的接通延时定时器放在与该步相连的动作框内,它表示定时器的线圈在该步内“通电”。
除了以上的基本结构之外,使用动作的修饰词可以在一步中完成不同的动作。修饰词允许在不增加逻辑的情况下控制动作。例如,可以使用修饰词L来限制某一动作执行的时间。不过在使用动作的修饰词时比较容易出错,初学者在使用动作的修饰词时要特别小心。在顺序功能图语言S7 - Graph中,将动作的修饰词称为动作中的命令。
点击排行
 PLC编程的基本规则
PLC编程的基本规则