您现在的位置是:首页 > PLC技术 > PLC技术
台达DVP-PLC加减速控制伺服电动机(PLSR)程序设计范例
![]() 来源:艾特贸易2018-01-23
来源:艾特贸易2018-01-23
简介范例示意如图 10-12 所示。 图 10-12 范例示意 【控制要求】 (1) 多齿凸轮与伺服电动机同轴转动,由接近开关检测凸齿产生的脉冲信号,传送带凸轮上有 10 个凸齿,则伺服电动机旋转一圈
范例示意如图10-12所示。

图10-12 范例示意
【控制要求】
(1)多齿凸轮与伺服电动机同轴转动,由接近开关检测凸齿产生的脉冲信号,传送带凸轮上有10个凸齿,则伺服电动机旋转一圈,接近开关将接收到10个脉冲信号。
(2)当伺服电动机旋转10圈后(产生100个脉冲信号),传送带停止,切刀执行切割产品动作,1s后切刀复位。由于伺服电动机所带的负载较大,因此伺服电动机在运动过程中需要有一个加减速过程,加减速时间设置为200ms,时序如图10-13所示。

图10-13 时序
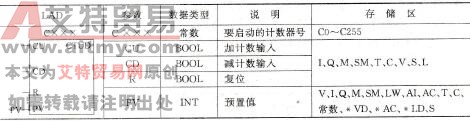
【元件说明】
元件说明见表10-7。
表10-7 元件说明

【控制程序】
控制程序如图10-14所示。

图10-14 控制程序
【程序说明】
(1)当启动开关闭合后,X1=On,伺服电动机以0.1r/s(f=1000Hz)的速度开始旋转,每隔20ms伺服电动机的转速增加0.1r/min,经过200ms后,转速增加到1r/s(f=10000Hz),伺服电动机开始以1r/s的速度匀速旋转。快到达目标位置时,伺服电动机开始作减速动作,到达目标位置后,伺服电动机停止运转。
(2)当脉冲暂停开关闭合后,X2=On,伺服电动机停止运转,但脉冲计数值不会被保持。当X2=Off时,伺服电动机继续旋转,到达目标位置后停止运转。
(3)由于伺服电动机每旋转一周,接近开关会接收到10个脉冲信号,当伺服电动机到达目标位置时,接近开关会接收100个脉冲信号,此时伺服电动机停止运转,切刀执行切割动作,1s后切刀返回,再过3s后,伺服电动机执行下一次定位动作。
(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)
点击排行
 PLC编程的基本规则
PLC编程的基本规则