您现在的位置是:首页 > 电气技术 > 电气技术
导航及无人机姿态检测融合算法很难?用sensor fusion来搞定!
![]() 来源:艾特贸易2017-09-05
来源:艾特贸易2017-09-05
简介1. 什么是姿态融合算法 简单来说, 姿态融合算法就是融合多种运动传感器数据(一般需要 3 轴加速度, 3 轴陀螺仪或者 3 轴地磁感应传感器), 通过数字滤波算法容错补偿,实现当前
1. 什么是姿态融合算法
简单来说,姿态融合算法就是融合多种运动传感器数据(一般需要3轴加速度, 3轴陀螺仪或者3轴地磁感应传感器),通过数字滤波算法容错补偿,实现当前姿态检测。
2. 数字滤波算法的选择
根据运动传感器噪声模型,一般以下滤波算法可供融合算法选择:
a) 互补滤波算法
b) 扩展卡尔曼滤波算法
c) 无迹卡尔曼滤波算法
d) 粒子滤波算法
e) Mahony互补滤波算法
3. ST姿态检测融合算法
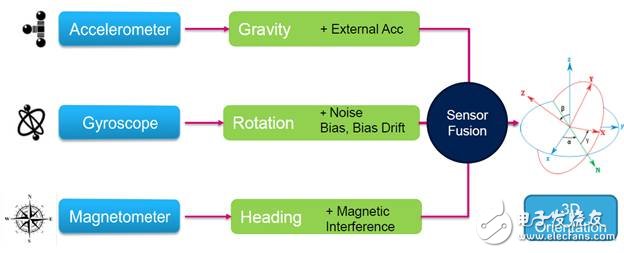
ST能提供完整的,高性能姿态检测融合算法--MotionFX/iNemoEngine。其能最大限度规避因加速度和地磁感应传感器数据异常,或者陀螺仪零飘带来的误差。多种数据输出选择,包括四元素,欧拉角,线性加速度以及重力矢量。
还有9轴和6轴两种选择:9轴的话需要3轴加速度,3轴陀螺仪和3轴地磁感应,能够提供当前三维空间的绝对方向信息,可以用作导航及无人机姿态检测等应用;6轴需要3轴加速度和3轴陀螺仪数据,可用于游戏,AR/VR等应用。
地磁传感器运动传感器3轴加速度计3轴陀螺仪意法半导体
点击排行
 室内风扇电机和霍尔元件的检测
室内风扇电机和霍尔元件的检测