您现在的位置是:首页 > PLC技术 > PLC技术
基于S7-300/400 PLC的三相异步电动机的Y-△起动控制
![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介Y- △(星 - 三角)起动控制程序, 为了让读者对用 S7-300/400 PLC 作为控制器的工程有一个完整的了解,本例中艾特贸易网小编比较详细地描述整个控制过程。 (1) 软硬件的配置 ① 1 套
Y-△(星-三角)起动控制程序,为了让读者对用S7-300/400 PLC作为控制器的工程有一个完整的了解,本例中艾特贸易网小编比较详细地描述整个控制过程。
(1)软硬件的配置
①1套STEP 7 V5.4 SP4。
②1台CPU 314C-2DP。
③1根编程电缆(或者CP5611卡)。
④电动机、接触器和继电器等。
电动机Y-△减压起动主回路图和接线图如图4-153和图4-154所示。CPU 314C-2DP是经济型模块,只有晶体管输出形式,PLC要控制接触器,必须加一级中间继电器。

图4-153 电动机Y-△减压起动主回路图

图4-154 电动机Y-△减压起动PLC接线图
【关键点】输出模块(如SM322,订货号6ES7 322-1HH01-0AA0)是继电器输出形式,可以直接驱动接触器,但是笔者仍然推荐加一级中间继电器,理由很明显,输出模块中的继电器的驱动能力一般较小,损坏后不易更换,而外置的中间继电器的驱动能力是可以选择的,而且损坏后很容易更换。
此外,急停按钮一般使用常闭触点,若使用常开触点,单从逻辑上是可行的,但在某些极端情况下,当接线意外断开时,急停按钮是不能起停机作用的,容易发生事故。这一点请读者务必注意。
(2)硬件组态
1)新建工程。打开STEP 7,新建工程,命名为“星三角起动”,如图4-155所示。

图4-155 新建工程
2)插入站点。选中“星三角起动”,在菜单栏中,单击“插入”→“站点”→“SIMATIC 300站点”,如图4-156所示。

图4-156 插入站点
3)打开程序硬件组态。双击“硬件”,如图4-157所示,之后弹出硬件组态界面。

图4-157 打开硬件组态
4)添加导轨。在硬件组态界面,先选中导轨“Rail”,按住鼠标的左键不放,将导轨拖入左侧的空白处,如图4-158所示,松开鼠标左键即可。

图4-158 添加导轨
5)插入CPU模块。选中“CPU 314C”的“V2.6”,按下鼠标的左键不放,将选中的CPU拖到导轨的槽位2,如图4-159所示。

图4-159 管理界面中被保护的块
6)打开输入/输出属性。如图4-160所示,“2”处的输入地址是IB124~IB126,输出地址是QB124~QB125,这不符合习惯,可以修改输入/输出属性,选中“DI24/D016”,并双击之,便可打开输入/输出属性。

图4-160 打开输入/输出属性
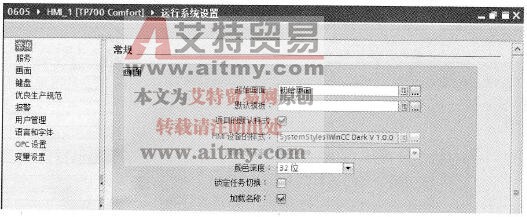
7)更改输入/输出的起始地址。先去掉“系统默认”前面的“√”,再在“开始”后面的方框中输入起始地址0,最后单击“确定”按钮即可,如图4-161所示。回到硬件组态界面如图4-160所示,单击工具栏中的“编译和保存”按钮 ,对硬件组态进行编译和保存,若有错误,会弹出警告。
,对硬件组态进行编译和保存,若有错误,会弹出警告。
(3)编写程序、调试程序
1)打开程序编辑器。回到管理器界面,选中“块”,双击“OB1”,弹出程序编辑器界面,如图4-162所示。
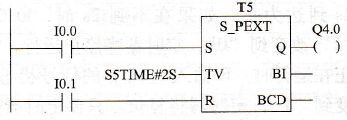
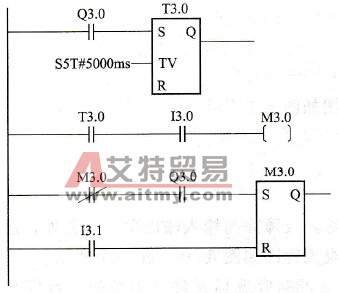
2)编写程序。在程序编辑器编写如图4-163所示的程序。首先闭合电源开关,接通总电源,再接通起动开关(I0.0),使电动机绕组实现Y形连接( Q0.1),延时5s后,电动机绕组改为△形连接(Q0.2),按下停止按钮(I0.1),电动机停转。

图4-161 更改输入/输出的起始地址

图4-162 打开程序编辑器

图4-163 打开程序编辑器
点击排行
 PLC编程的基本规则
PLC编程的基本规则